Step-by-Step Guide to Building Your First Humanoid Robot
Discover how to build your first humanoid robot with this comprehensive guide, featuring essential tips and resources for beginners.
Building a humanoid robot can be an exciting and rewarding experience for hobbyists and tech enthusiasts alike. It serves as an intersection of engineering, programming, and robotics, allowing you to bring life to an inanimate creation. In this article, we will explore the essential components, processes, and tips required to successfully build your very first humanoid robot.
Building your first humanoid robot can be an exciting journey into the world of robotics and engineering. This step-by-step guide will walk you through the essential stages, from choosing the right materials to programming basic movements. To enhance your project visually, consider tools like this resource to visualize your 3D logo concepts.
Understanding Humanoid Robots
Humanoid robots are designed to mimic the appearance and movements of humans. This can include features such as arms, legs, a head, and even facial expressions. These robots are often used in research, entertainment, and various applications in industries like healthcare and education.
Key Characteristics of Humanoid Robots
- Mobility: Humanoid robots often have the capability to walk, run, and perform complex movements.
- Interaction: They can respond to commands, recognize speech, and sometimes even engage in conversation.
- Sensor Integration: Equipped with various sensors like cameras, ultrasonic sensors, and gyroscopes to perceive their environment.
- Artificial Intelligence: Many incorporate AI for decision-making and learning abilities.
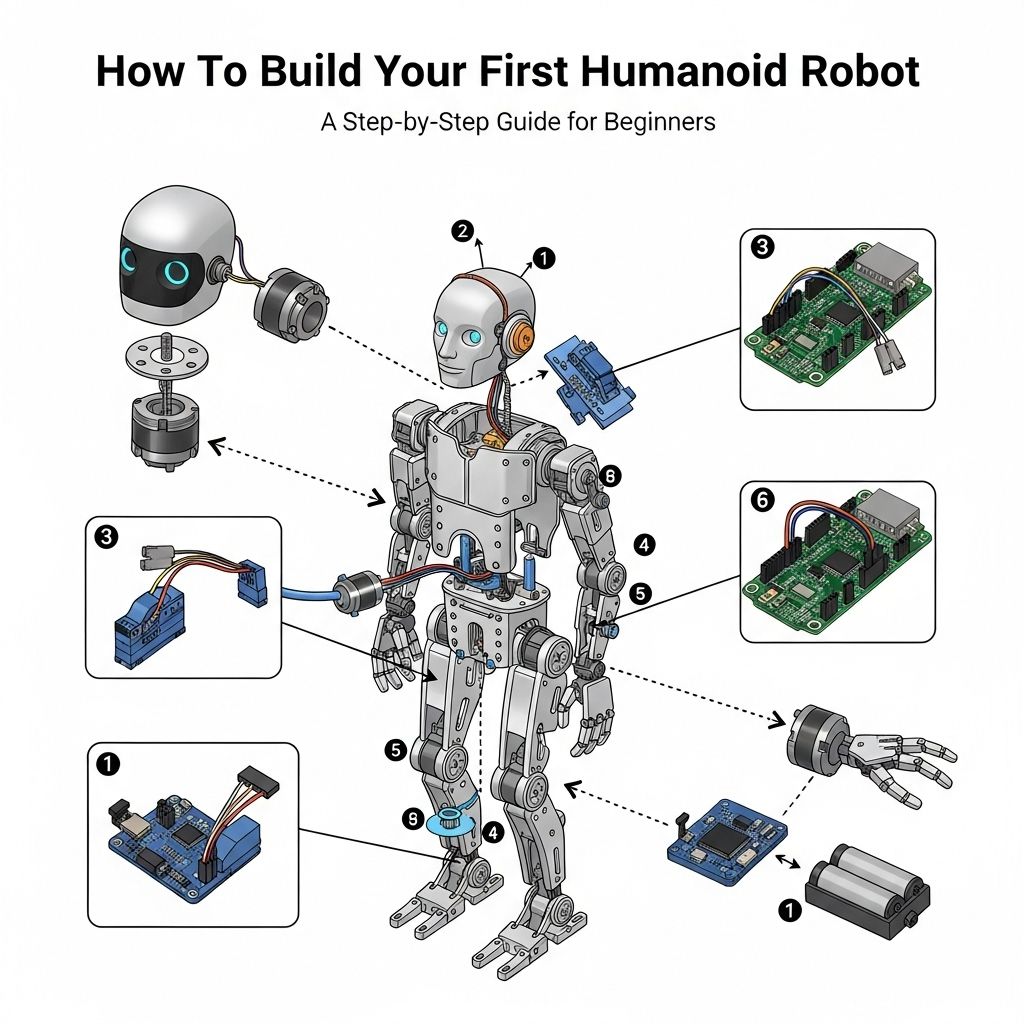
Components Needed for Building a Humanoid Robot
When embarking on your humanoid robot project, you will need to gather various components. Below are the primary elements:
1. Microcontroller
The brain of your robot, responsible for processing inputs and controlling outputs. Common choices include:
- Arduino
- Raspberry Pi
- ESP32
2. Motors
To achieve movement, you’ll need motors to drive the joints of the robot. Types of motors include:
- Servo Motors: Ideal for precise control of angular position.
- DC Motors: Good for simple rotational motion.
3. Sensors
To assist with navigation and interaction:
- Ultrasonic Sensors: For distance measuring.
- Infrared Sensors: For obstacle detection.
- Cameras: For visual processing.
4. Chassis and Frame
A stable structure is essential. You can build a chassis using:
- 3D Printed Parts
- Aluminum or Plastic Sheets
- Wood Components
5. Power Supply
Consider how you will power your robot:
- Battery Packs: Rechargeable lithium-ion batteries are popular.
- AC Power Supplies: For stationary projects.
Designing Your Humanoid Robot
With components listed, it’s time to move onto the design phase. This step will help you conceptualize the robot’s structure and functionality.
1. Sketch Your Ideas
Start with rough sketches to visualize the design. Include all major components. Consider the following:
- Height and Proportions
- Joint Locations
- Weight Distribution
2. CAD Modeling
Using CAD software, create detailed models of your design. Popular tools include:
- Fusion 360
- SolidWorks
- Tinkercad
3. Selecting Materials
Choose materials based on strength, weight, and ease of manipulation. Some good options include:
- Plastic for lightweight structures
- Metal for durability
- Composite materials for balancing weight and strength
Assembling Your Humanoid Robot
Now that you have your design ready, it’s time to assemble the components.
1. Build the Frame
Start by constructing the robot’s frame based on your designs. Ensure all joints are flexible and can accommodate movement.
2. Install Motors
Attach the motors at their respective joints. This will typically involve:
- Mounting the motors securely.
- Connecting them to the microcontroller via appropriate wiring.
3. Integrate Sensors
Position sensors where they can best serve their functions, such as:
- Ultrasonic sensors on the front for navigation.
- Cameras on the head for visual input.
Programming Your Humanoid Robot
After assembling your robot, programming is essential to give it instructions on how to behave.
1. Setting Up Development Environment
Choose a programming language and set up your development environment. Popular choices include:
- Python for Raspberry Pi
- C++ for Arduino
- JavaScript for web-based control
2. Writing the Code
Begin with basic movements and gradually introduce more complex behaviors. Consider the following:
- Basic movements like walking or waving.
- Object detection and response behaviors.
3. Testing and Debugging
As you program, continuously test the functionality of your robot. Common methods include:
- Simulating movements in the software first.
- Running physical tests to observe real-world behaviors.
Enhancing Functionality and Features
Once your humanoid robot is operational, consider adding more sophisticated features:
1. Artificial Intelligence
Integrate AI for advanced behaviors. Libraries like TensorFlow or OpenCV can be useful for image processing and machine learning tasks.
2. Voice Recognition
Implement voice commands using software such as:
- Pocketsphinx
- Google Speech Recognition API
3. Remote Control Options
Consider adding remote control capabilities via:
- Bluetooth
- Wi-Fi connections
Final Thoughts
The journey of building your first humanoid robot will be filled with challenges and learning opportunities. While it may seem daunting initially, taking it step by step will lead to a rewarding experience. As you become more familiar with robotics, you can expand your skills and attempt more complex projects. Always remember to document your progress and share your learnings with the community. Happy building!
FAQ
What materials do I need to build my first humanoid robot?
To build your first humanoid robot, you will need microcontrollers, servos, sensors, a power source, a chassis, and programming software.
What are the basic steps in building a humanoid robot?
The basic steps include designing the robot, selecting materials, assembling the components, programming the control system, and testing the robot’s movements.
Do I need programming skills to build a humanoid robot?
Yes, basic programming skills are necessary to code the robot’s movements and functionalities, typically using languages like Python or Arduino.
Where can I find tutorials for building a humanoid robot?
You can find tutorials on websites like YouTube, robotics forums, and educational platforms that focus on robotics and electronics.
What are some common challenges faced when building a humanoid robot?
Common challenges include balancing the robot, ensuring smooth movement, power management, and programming complex behaviors.
Can I use off-the-shelf kits for building a humanoid robot?
Yes, there are many off-the-shelf kits available that provide all necessary components and instructions for building a humanoid robot, making it easier for beginners.